基于Gauss-Hermite逼近的非线性加权观测融合无迹Kalman滤波器
数据融合(DF)或多传感器数据融合(MSDF)是指组合或整合来自不同有源或无源传感器数据、预处理数据或信息的过程,以产生更精准、具体、全面和统一的数据集、模型或决策。随着信息技术的广泛发展,具有更广义化概念的“信息融合”被提了出来。
李云, 孙书利, 郝钢. 基于Gauss-Hermite逼近的非线性加权观测融合无迹Kalman滤波器. 自动化学报, 2019, 45(3): 593-603
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c170534
滤波算法在定位、目标跟踪、导航和故障诊断等方面发挥着重要作用。然而,单个传感器难以满足高精度、高容错性等要求,因此,多传感器融合估计技术应运而生。在过去的几十年里,线性系统的融合估计理论已经有了一系列完整的理论基础。目前常用的信息融合估计方法主要包括两个基本的结构:集中式融合估计和分布式融合估计。集中式融合估计将所有传感器信息进行增广,并基于增广的观测设计融合状态估计。该算法没有信息丢失,当所有传感器没有故障时估计精度具有全局最优性,可作为其他融合算法在精度上的衡量标准,也是现在多传感器系统经常采用的融合方式之一。然而,由于集中式融合算法计算量大,在传感器数量较多的情况下,集中式融合算法会导致整个系统实时性差。特别是当存在故障传感器时可能导致滤波器发散。分布式融合算法是把各个局部状态估计送入融合中心,根据一定的融合准则进行加权得到融合估计。分布式融合方式具有良好的鲁棒性,计算量小且容错性强,估计精度是局部最优、全局次优的。
加权观测融合算法根据加权最小二乘准则,将集中式融合系统增广的高维观测进行压缩处理,得到降维的观测,基于降维观测设计的滤波器可以明显地减小计算负担。对于线性系统,加权观测融合算法在最小方差意义下和集中式融合算法具有数值等价性,因而具有重要的应用价值。然而,绝大多数系统具有非线性特性,例如,大多数定位系统观测方程是在球面坐标系下建立的,而估计和分析状态时往往又是在笛卡尔坐标系下进行的,这使得观测方程具有某种非线性特性。
本文主要创新点及工作如下:首先利用分段的Gauss-Hermite逼近方法将系统观测方程统一处理,得到近似的中介函数以及系数矩阵。进而基于此中介函数、系数矩阵以及加权最小二乘法,提出了非线性加权观测融合算法。该融合算法可对增广的高维观测进行压缩降维,为后续滤波等工作降低计算负担。最后结合UKF滤波算法,提出了非线性加权观测融合UKF滤波算法(WMF-UKF)。该算法可以处理非线性多传感器系统的融合估计问题。与集中式融合UKF(CMF-UKF)算法相比,WMF-UKF具有与之逼近的估计精度,但计算量明显降低,并且随着传感器数量的增加,该算法在计算量上的优势将更加明显。
考虑一个带有8传感器的平面跟踪系统。在笛卡尔坐标下的状态方程和观测方程如下:

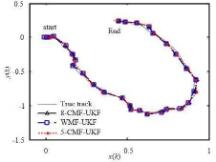
利用以上方法得到的融合跟踪曲线如图4-6所示。

图4 真实轨迹和WMF-UKF、8-CMF-UKF、5-CMF-UKF的估计曲线
Fig. 4 True and estimated tracks using WMF-UKF, 8-CMF-UKF and 5-CMF-UKF

图5 位置融合估计的AMSE曲线
Fig. 5 AMSE curves of position fusion estimates

图6 带不同Hermite多项式的WMF-UKF位置AMSE曲线
Fig. 6 AMSE curves of WMF-UKFs with different Hermite polynomials for position

微信扫描关注公众号,及时掌握新动向
2.本文版权归属原作所有,仅代表作者本人观点,不代表比特范的观点或立场
2.本文版权归属原作所有,仅代表作者本人观点,不代表比特范的观点或立场









的最新资产风险评估分析")